為了更好了解並除錯i2c_master_byte_ctrl這個模組,
我建立簡單的testbench檔案
`include "i2c_master_byte_ctrl.v"
`include "i2c_master_bit_ctrl.v"
`include "i2c_master_defines.v"
module _;
parameter PERIOD = 10 ;
reg clk = 0 ;
reg rst = 1 ;
reg nReset = 0 ;
reg ena = 1 ;
reg [15:0] clk_cnt = 5 ;
reg start = 0 ;
reg stop = 0 ;
reg read = 0 ;
reg write = 0 ;
reg ack_in = 0 ;
reg [7:0] din = 0 ;
reg scl_i = 1 ;
reg sda_i = 1 ;
wire cmd_ack ;
wire ack_out ;
wire i2c_busy ;
wire i2c_al ;
wire [7:0] dout ;
wire scl_o ;
wire scl_oen ;
wire sda_o ;
wire sda_oen ;
initial
begin
forever #(PERIOD/2) clk=~clk;
end
initial
begin
#(PERIOD*2) nReset = 1;
end
i2c_master_byte_ctrl __ (
.clk ( clk ),
... 省略
.sda_oen ( sda_oen )
);
initial begin
$dumpfile("test.vcd");
$dumpvars(0);
end
initial begin
#6000 $finish;
end
endmodule
|
狀態跳轉測試
code
- rst 依序放掉
- 給Command Register 訊號 Start+Read
- 收到 byte ack 後放掉
- 在一段時間後停止模擬
initial begin
$dumpfile("test.vcd");
$dumpvars();
#5 nReset = 1;
#5 rst = 0;
#3 start = 1; read = 1;
wait(cmd_ack) start = 0; read = 0;
end
initial begin
#4000 $finish;
end
|
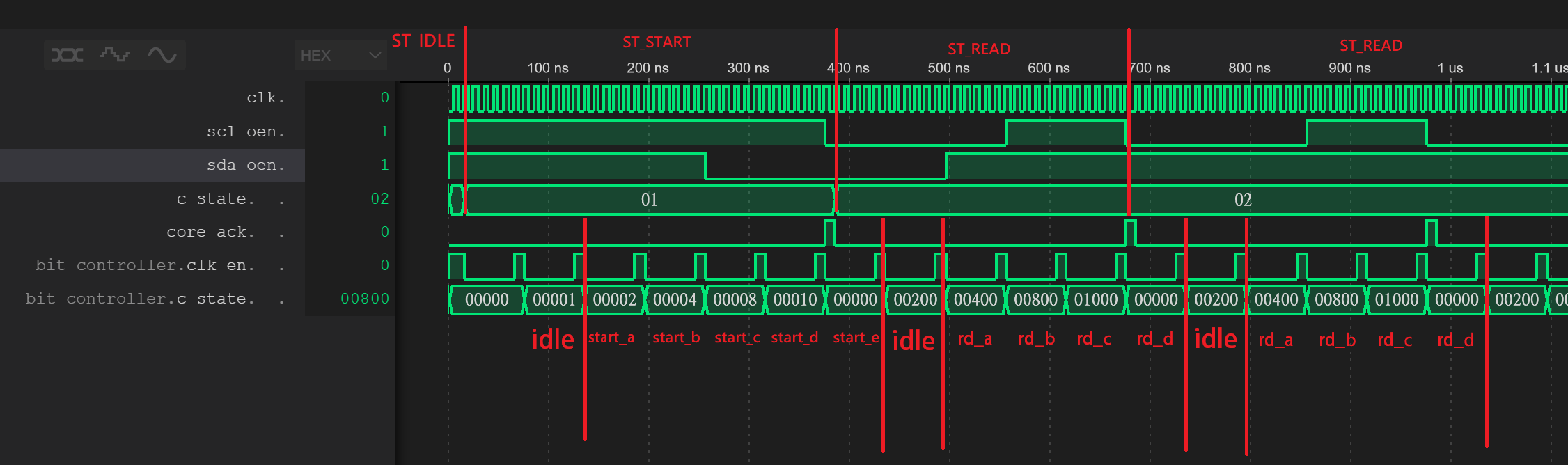
先看起始部分:
- clk: 系統頻率
- 沒寫出來的scl_i, sda_i: 暫時設high以防影響.
- scl_oen, sda_oen: bit ctrl 的輸出, 根據其state會有不同輸出.
- c_state: (byte ctrl 的)
- 因為 byte ctrl 使用系統clk, 很快就跳到 ST_IDLE, 並且指定start指令給 bit ctrl
- 等待 bit ctrl 的
core_ack, 改成跳到 ST_START, 並且指定read指令給 bit ctrl
- core_ack: bit ctrl 每完成一個 bit 指令, 就會回傳
core_ack(內部ack) 給 byte ctrl
- clk_en: 為 bit ctrl 狀態機跳動的頻率, 經prescale value除頻, 為了方便觀察設為 5, 所以只跳動5次
- bit controller.c_state: bit ctrl 的 狀態, 會在每一次
clk_en 之後改變
請特別注意此處的state, 除了IDLE, 即使已經在該state, 收到core_ack才做出動作
寫入測試
code
initial begin
$dumpfile("test.vcd");
$dumpvars();
assign scl_i = scl_oen;
sda_i = 1;
#5 nReset = 1;
#5 rst = 0;
#5 start = 1; write = 1;
din = 8'b00111011;
wait( __.c_state == 8 )
sda_i = 0;
wait(cmd_ack | i2c_al)
start = 0; write = 0; din = 8'b0; sda_i = 1;
end
initial begin
#4000 $finish;
end
|
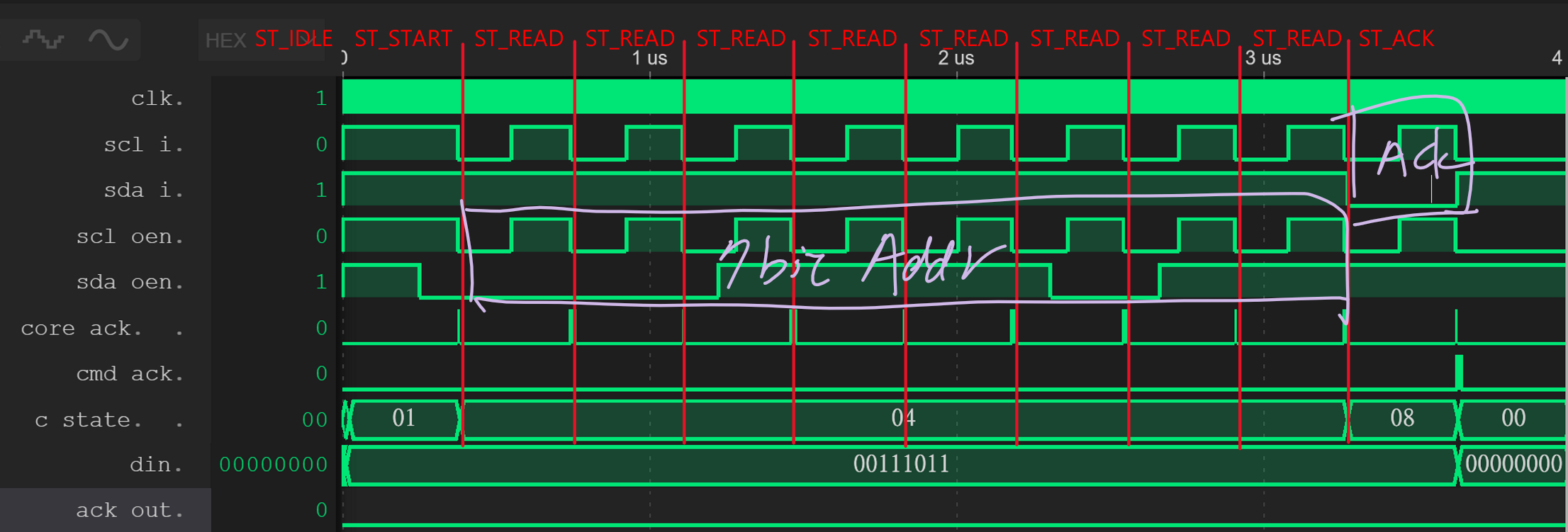
假設寫入為slave地址, 0011101, W/R 為 1 代表想要讀取該地址的資訊
clk: 系統頻率
scl_i, sda_i: slave 的 scl, sda
scl_oen, sda_oen: bit ctrl 輸出, 在SCL為高時保持SDA值
core_ack: bit ctrl 每完成一個 bit 指令, 就會回傳 內部ack 給 byte ctrl
c_state: byte ctrl 的狀態, 使用系統clk
din: 地址 + W/R
ack_out: 傳遞到 top 的 ack 訊號
|
寫入7-bit addr, 在寫入1 bit W/R, 接著收ACK
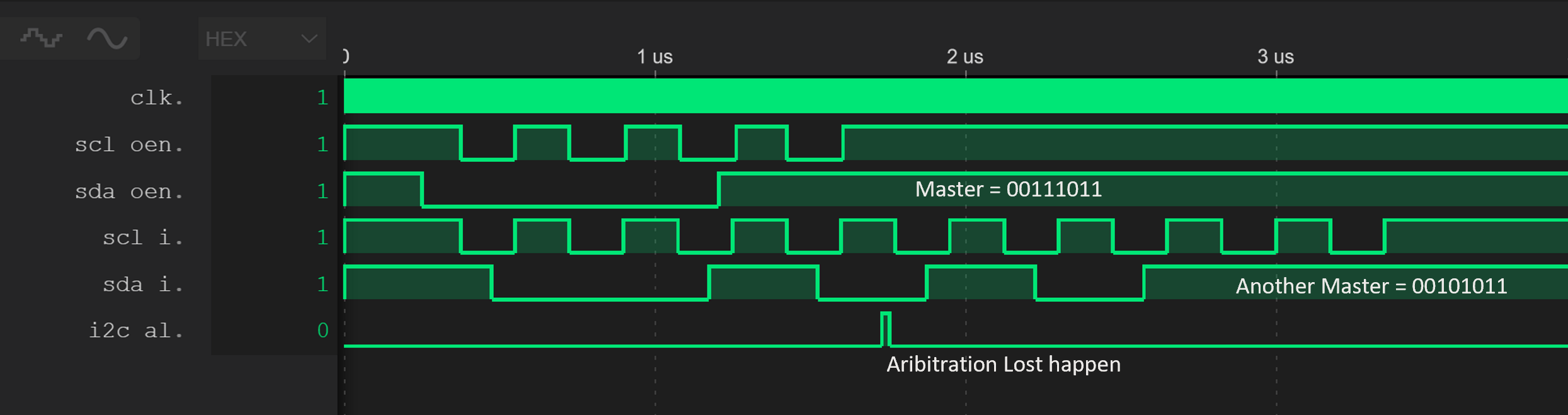
Aribitration Lost
code
initial begin
#200
repeat(9) begin
#180 scl_i = ~scl_i;
#180 scl_i = ~scl_i;
end
end
initial begin
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
end
initial begin
$dumpfile("test.vcd");
$dumpvars();
#5 nReset = 1;
#5 rst = 0;
#5 start = 1; write = 1;
din = 8'b00111011;
wait( __.c_state == 8 )
sda_i = 0;
wait(cmd_ack | i2c_al)
start = 0; write = 0; din = 8'b0; sda_i = 1;
end
|
當aribitration Lost發生時, master本身進入 ST_IDLE, 下空指令 I2C_CMD_NOP
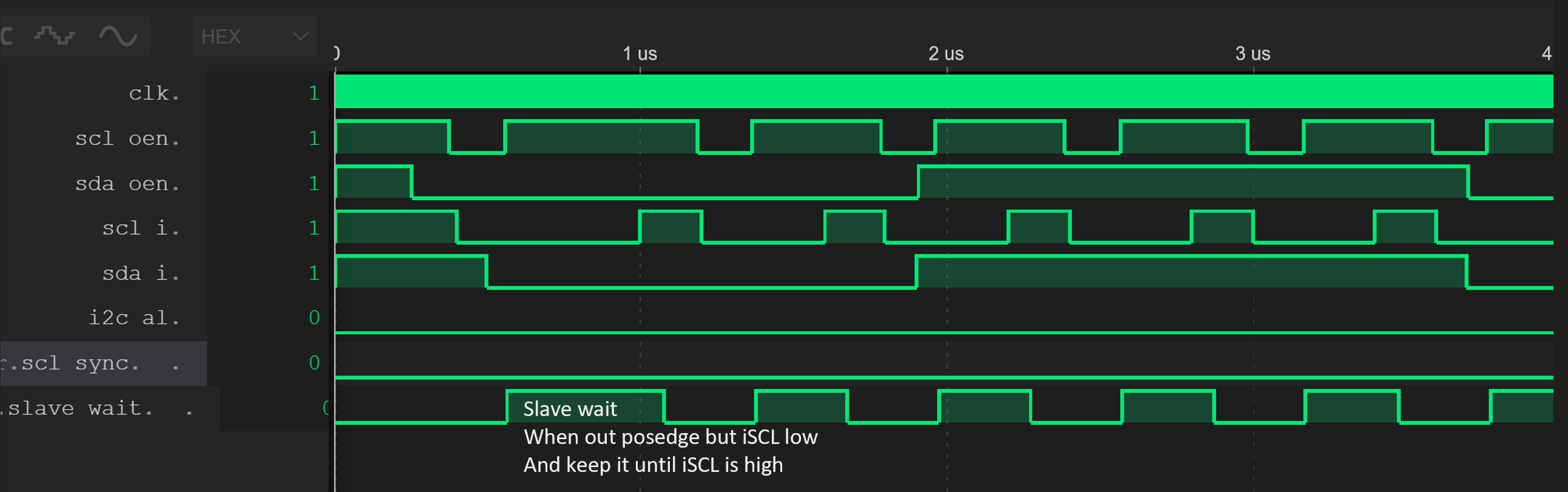
slave_wait
code
initial begin
#200
#200 scl_i = 0;
#600 scl_i = 1;
repeat(9) begin
#200 scl_i = ~scl_i;
#400 scl_i = ~scl_i;
end
end
initial begin
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
end
|
slave_wait 會讓 bit ctrl rst, 慢速 clock 重算.
直到 iSCL 為 high 才重新計算
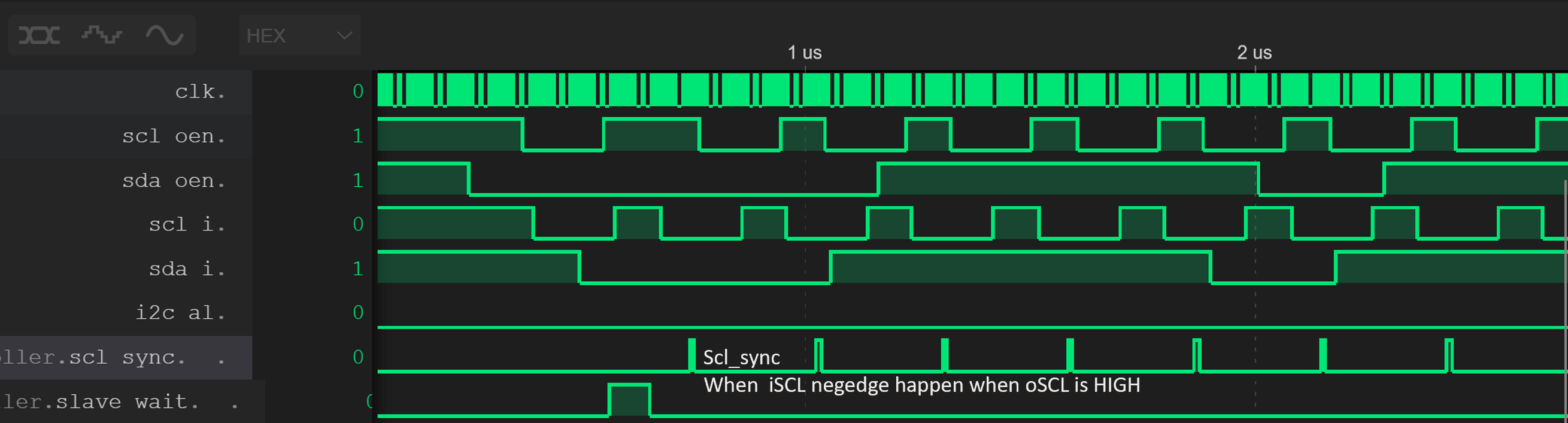
scl_sync
code
initial begin
#200
#200 scl_i = 0;
repeat(9) begin
#180 scl_i = ~scl_i;
#100 scl_i = ~scl_i;
end
end
initial begin
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 0;
@(negedge scl_i) #100 sda_i = 1;
@(negedge scl_i) #100 sda_i = 1;
end
|
在oSCL HIGH時, 若發現 iSCL negedge 則讓 慢速clk 重算.